

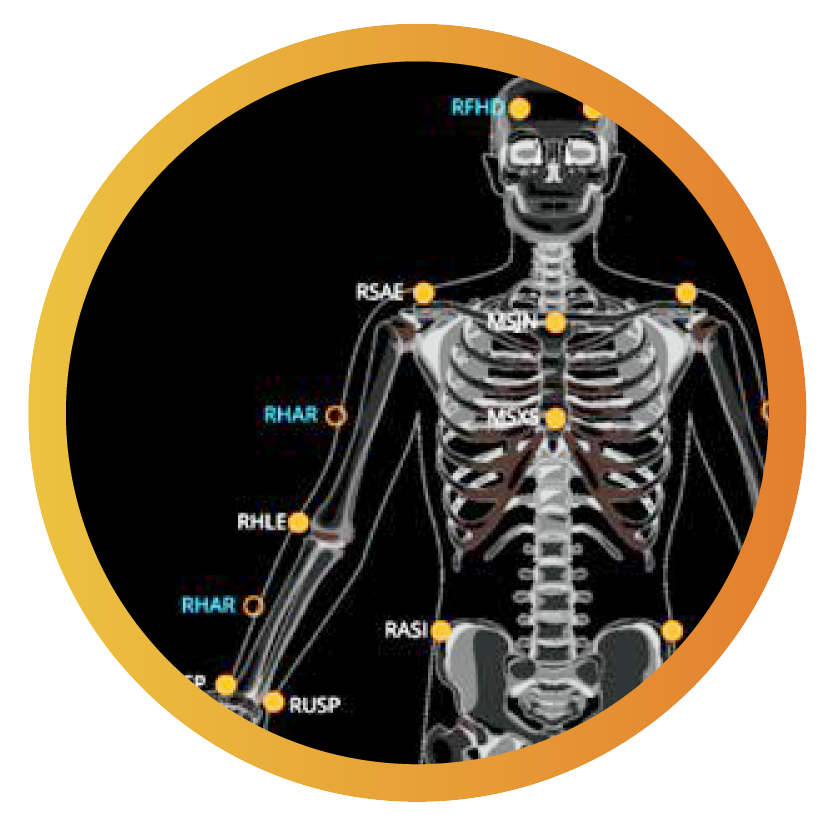

Pipe provides an easy way to process all your motion capture data from raw signals to joint kinematics and kinetics.
Pipe offers flexible and customizable tasks, making it easy to modify and expand your pipelines with new models or analysis steps. It’s a future-proof solution that evolves with your research or clinical needs.
One of Pipe’s standout features is its transparency. With clear operations and highly detailed documentation, users have complete visibility into the data flow and analysis steps.
Pipe integrates seamlessly with various environments, offering great flexibility. Whether you use MATLAB or Python, Pipe supports both platforms.
It also works with leading motion capture systems like Vicon Nexus and Qualisys Track Manager, making it easy to fit into your existing workflows.
At Moveck, we know flexibility is key in data analysis. Pipe supports a wide range of published and verified models, as well as data processing algorithms, making it easy to fit into your current setup.
We’re always expanding our compatibility and open to adding more algorithms based on user needs and industry trends. Pipe remains a valuable tool for researchers and clinicians.
Pipe offers specialized algorithms specifically designed for kinematic and kinetic calculations based on your input data. It delivers results in a universally readable HDF5 format, ensuring easy accessibility.
Additionally, Pipe outputs integrate seamlessly with other tools like Cleanse for data cleaning and report generation.
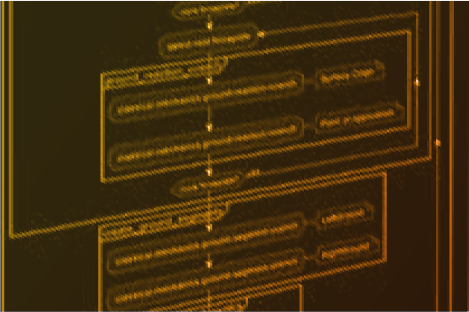
prepare your motion capture data
use predifined skeleton model
reconstruct skeleton dynamics
Fill gap
Vicon Plung-in Gait
Geometric pose estimations
Signal filter
Force platform
Qualisys IOR
CGM 1.0 – 2.3
Least square pose estimations
Body segment inertial parameters
Electromyography
LWBM*
*From the article by Dumas et al., Adjustments to McConville et al. and Young et al. body segment inertial parameters, J Biomech, 2007;40(3):543-53 and related articles.
Inverse dynamics
prepare your motion capture data
Use predifined skeleton model
Reconstruct skeleton dynamics
Fill gap
Vicon Plung-in Gait
Geometric pose estimations
Signal filter
Qualisys IOR
Least square pose estimations
Force platform
CGM 1.0 – 2.3
Body segment inertial parameters
Electromyography
LWBM*
Inverse dynamics
*From the article by Dumas et al., Adjustments to McConville et al. and Young et al. body segment inertial parameters, J Biomech, 2007;40(3):543-53 and related articles.
import format
estimate model outputs
Marker-based
Euler angles
Markerless
IMU
Progression angles
Joint kenetics
import format
estimate model outputs
Marker-based
Euler angles
Markerless
Progression angles
IMU
Joint kenetics
Moveck Solution inc.
190B, Dorchester street Office 70 Quebec City
(QC) G1K 5Y9, Canada
email: contact@moveck.com