


Pipe offre une solution simple pour traiter toutes vos données de capture de mouvement, depuis les signaux bruts jusqu’à la cinématique et la dynamique articulaire
Pipe offre des tâches flexibles et personnalisables, facilitant la modification et l’expansion de vos pipelines avec de nouveaux modèles ou étapes d’analyse. C’est une solution pérenne qui évolue avec vos besoins de recherche ou cliniques.
L’une des caractéristiques remarquables de Pipe est sa transparence. Grâce à des opérations claires et à une documentation très détaillée, les utilisateurs bénéficient d’une visibilité complète sur le flux de données et les étapes d’analyse.
Pipe s’intègre parfaitement dans divers environnements, offrant une grande flexibilité. Que vous utilisiez MATLAB ou Python, Pipe prend en charge les deux plateformes.
Il fonctionne également avec les principaux systèmes de capture de mouvement tels que Vicon Nexus et Qualisys Track Manager, ce qui facilite son intégration dans vos flux de travail existants.
Chez Moveck, nous savons que la flexibilité est essentielle dans l’analyse des données. Pipe prend en charge une large gamme de modèles publiés et vérifiés, ainsi que des algorithmes de traitement de données, ce qui facilite son intégration dans votre configuration actuelle.
Nous élargissons constamment notre compatibilité et sommes ouverts à l’ajout de nouveaux algorithmes en fonction des besoins des utilisateurs et des tendances de l’industrie. Pipe demeure un outil précieux pour les chercheurs et les cliniciens.
Pipe propose des algorithmes spécialisés, spécifiquement conçus pour les calculs cinématiques et cinétiques à partir de vos données d’entrée. Il fournit les résultats dans un format HDF5 universellement lisible, garantissant une accessibilité facile.
Additionally, Pipe outputs integrate seamlessly with other tools like Cleanse for data cleaning and report generation.
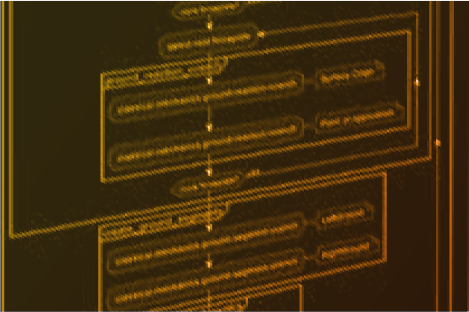
préparez vos données de capture de mouvement
utilisez un modèle de squelette prédéfini
reconstruisez la dynamique du squelette
Fill gap
Vicon Plung-in Gait
Estimations de pose géométrique
Filtre de signal
Plateforme de force
Qualisys IOR
CGM 1.0 – 2.3
Estimations de pose par moindres carrés
Paramètres inertiels des segments corporels
Électromyographie
LWBM*
*Tiré de l’article de Dumas et al., « Adjustments to McConville et al. and Young et al. body segment inertial parameters, » J Biomech, 2007;40(3):543-53 et articles connexes.
Dynamique inverse
Préparez vos données de capture de mouvement
Utilisez un modèle de squelette prédéfini
Reconstruisez la dynamique du squelette
Fill gap
Vicon Plung-in Gait
Estimations de pose géométrique
Filtre de signal
Qualisys IOR
Estimations de pose par moindres carrés
Plateforme de force
CGM 1.0 – 2.3
Paramètres inertiels des segments corporels
Électromyographie
LWBM*
Dynamique inverse
*Tiré de l’article de Dumas et al., « Adjustments to McConville et al. and Young et al. body segment inertial parameters, » J Biomech, 2007;40(3):543-53 et articles connexes.
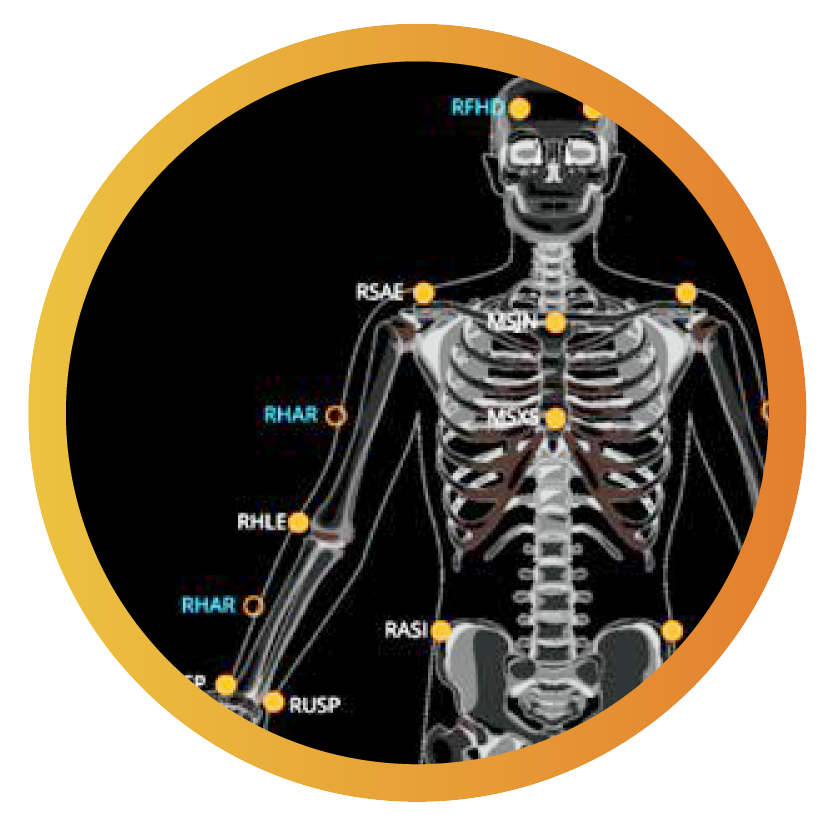
format d’importation
estimation des sorties de modèle
Marker-based
Angles d’Euler
Markerless
IMU
Angles de progression
Cinétique articulaire
Format d’importation
Estimation des sorties de modèle
Marker-based
Angles d’Euler
Markerless
Angles de progression
IMU
Cinétique articulaire
Solution Moveck inc.
190B, rue Dorchester, bureau 70, Québec
(QC) G1K 5Y9, Canada
courriel: contact@moveck.com